
反恐机器人研究综述
时间: 2024-06-17 03:03:57 | 作者: 乐鱼在线登录
摘 要:随着全球反恐局势日趋紧张, 高新技术快速的提升, 反恐机器人的研究和应用方兴未艾。本文在介绍反恐机器人发展现状的基础上, 分析了反恐机器人的核心技术, 总结了各关键技术的优缺点和应用场景, 并展望了其未来发展趋势, 为反恐机器人的研究和应用提供理论支撑。
作者:李婷婷 李强 刘书芸 骆聪聪(公安部第一研究所)来自:李婷婷,李强,刘书芸,骆聪聪.反恐机器人研究综述[J].中国安全防范技术与应用,2018(03):30-33.
当前, 由于恐怖活动的多样化、复杂化以及巨大的危害性, 极度影响社会安定和经济繁荣, 西方发达国家十分重视发展高技术反恐装备, 积极研究反恐预警、情报侦察、危险品或爆炸物排除以及打击的各种武器装备, 以提高本国的反恐威慑和作战能力, 对于反恐机器人更是情有独钟。反恐机器人在反恐一线主要是用来靠前侦察、获取现场信息, 深入各种复杂空间、处置危险爆炸物, 也可对一些持枪实施有效攻击, 是执行反恐排爆任务必不可少的装备。美国、德国、加拿大、以色列等国对反恐机器人研究处于世界领头羊, 已经有批量反恐机器人用于反恐作战行动;国内对反恐机器人研究虽起步晚, 但成果显著, 已经研发出几种性能优异、适应能力强的反恐机器人。随着人工智能技术的发展, 反恐机器人的性能将不断改善, 并大范围的应用于反恐战线 反恐机器人的研究现状
反恐机器人可分为侦察机器人、排爆机器人和攻击机器人, 各种机器人的应用场景和功能侧重点不同。侦察机器人大多数都用在战场的巡逻监控和敌情侦察。排爆机器人大多数都用在对爆炸物和可疑危险物的转移和排除。攻击机器人大多数都用在战场作战, 由于其携带致命武器, 危险性较高。各国反恐机器人的研究水平存在很明显梯度, 国外反恐机器人研究起步较早, 自20世纪60年代至今, 技术水平较高。其中, 美国、英国、法国、以色列、德国、加拿大、日本处于世界领头羊, 在机器人的多样性、灵活性、可靠性方面优势明显。
对于侦察机器人和排爆机器人的研究历来是各国的研究重点。犯罪手段多变, 恐怖活动规模和杀伤力逐步的提升, 对于恐怖现场的侦察以及危险物的排除十分重要。各国研制的侦察机器人虽外形不同, 但功能基本类似, 主要是对复杂环境的现场侦察, 对危险人物和物品的定位和排除。用于侦察的机器人, 尺寸小, 重量轻, 携带机和无线传输装置, 往往要设计成各种隐蔽性的形状和具有特殊的功能, 既能下河入水, 又能爬墙探高。侦察机器人在技术方面的要求上更加侧重于外形的隐蔽性和摄像传输功能的可靠性。


排爆机器人大多数都用在对爆炸物的转移和处置, 用于转移爆炸物的机器人要有良好的机动性能, 一般带有多个可更换臂爪, 有良好的翻沟越障能力;用于处置爆炸物的机器人在现场主要是模仿人对爆炸物进行抓、拿、铲、推、翻以及水枪摧毁等技术动作, 在技术方面的要求上更侧重于本身的坚固性和排爆的可靠性。如加拿大Inuktun公司研制的VGTV侦察机器人, 英国ABP公司生产的Cyclops、Bison、Ground-hog、Lyn等型号排爆机器人, 美国研制的小型Dragon Runner排爆机器人, 加拿大Pedsco公司生产的排爆机器人RMI。如图1所示的三种应用较多的外国反恐机器人, 这些侦察、排爆机器人应用场景范围广、各有特色, 在工作环境适应性、排爆可靠性方面都有独特设计。
反恐攻击机器人作为一种无人武器装备, 大范围的应用于战场上, 对于有效打击敌人、减少伤亡作用重大。美国因其投入资金多、应用广, 在反恐攻击机器人方面处于世界顶配水平。如Foster-Miller公司开发的TALON机器人, 移动速度快、越障性能突出, 可以装备多种型号机关枪、反坦克火箭炮、拆弹机械手等, 在火力支援和武力打击方面性能突出。
我国反恐机器人的研究始于20世纪90年代, 相比于国外, 起步较晚、基础较弱。经过近30年的努力, 我国的反恐机器人研究成果显著。从高校、研究所到企业, 都有较成熟的反恐机器人产品。国产反恐机器人在国内占有较大市场占有率, 尤其是排爆机器人的研究, 在性能和机械结构上, 均已达到国际同类机器人水平。PATROLMANⅠ型排爆侦察机器人大范围的应用于机场和船舶的侦察排爆。中科院沈阳自动化研究所研制的“灵蜥”系列, 增加了手臂碗摆, 搜索范围较大。哈尔滨工业大学研制的排爆机器人, 机械手臂自由度多, 负载大, 稳定性很高可靠。u Bot系列排爆机器人产品完备, 分大中小三种类型, 适用于不同场合、不同爆炸物。
反恐机器人执行任务的特殊性决定了其技术的复杂性, 与一般机器人相比, 反恐机器人对稳定性、可靠性和智能化要求更高, 所涉及的技术范围更广、难度更大。反恐机器人的关键技术最重要的包含移动机构、执行机构、多传感器信息融合、控制技术、通信技术和导航技术。
移动机构是机器人的重要基础, 是反恐机器人应对各种作战环境的先决条件。移动机构的设计直接决定了机器人对外部环境的适应性和稳定能力。移动平台的越障能力和速度两个性能指标互相制约。现有的移动平台设计主要有轮式、履带式、轮履结合式和腿足式。轮式和履带式应用较多, 速度相对较快, 而轮履结合式和腿足式应用较少, 履带式和腿足式越障能力强, 但速度慢, 腿足式的自平衡难度较大。
执行机构主要负责对爆炸物等危险物品的处置, 通常是多自由度的机械臂。因需处置的爆炸物种类多样, 在质量、形状方面存在一定的差异, 因此执行机构的灵活性和稳定能力十分重要。对于爆炸物的抓取一般是采用远程遥控或视觉伺服, 由于环境复杂, 现场标定困难, 所以执行机构抓取精度和力度控制是难点。现在的研究重点是更精确的远程遥控技术, 更稳定的视觉伺服技术, 从而能够实现对爆炸物的精确处置, 提高反恐机器人的稳定性和可靠性。
多传感器信息融合是为应对复杂环境而提出的技术方法, 反恐机器人对环境的感知能力决定了机器人的环境适应性、稳定性和可靠性。多传感器信息融合指的是将多种传感器信息进行融合处理, 形成对外部环境的综合描述。
运动控制技术直接影响机器人的运动性能, 是机器人的关键技术之一。根据机器人运动功能的复杂程度, 选择相应的控制器。现有控制器包括低位微控制器、DSP、多位微控制器、工控计算机。反恐机器人多采用基于工控计算机的控制管理系统。前控制器的反恐机器人运动功能复杂、智能化程度高, 对控制器的控制精度要求比较高。设计多样, 未有统一标准, 不同款式的机器人要定制相应的控制器。其研究和发展趋势是模块化、网络化、标准化的控制系统。
通信技术主要解决反恐机器人与服务后台及遥控终端之间的通信问题。服务后台要对机器人采集信息进行实时分析、决断, 在执行特殊任务时, 有时需要人工参与, 技术人员通过遥控终端对机器人来控制。这就对通信的实时性、安全性、稳定性提出较高要求。现有通信技术包括有线和无线两种通信方式。有线传输快速可靠, 但易受环境约束, 有较大局限性。无线传输相对灵活, 但实时性、稳定性较差。因此, 一般都会采用多模态通信方式, 对多种通信方式来进行融合, 实现不同环境的稳定通信。
机器人系统中, 导航技术是机器人感知和行动能力的关键技术, 涉及环境感知、环境认知, 运动规划、避障规划与执行等科学问题。现有机器人定位导航技术最重要的包含电磁导航、惯性导航、GPS导航、超声波导航、激光导航和基于视觉的导航, 不同导航方式的优缺点如表1所示, 选择适当的定位导航技术能有效地拓展机器人的工作空间和应用领域。
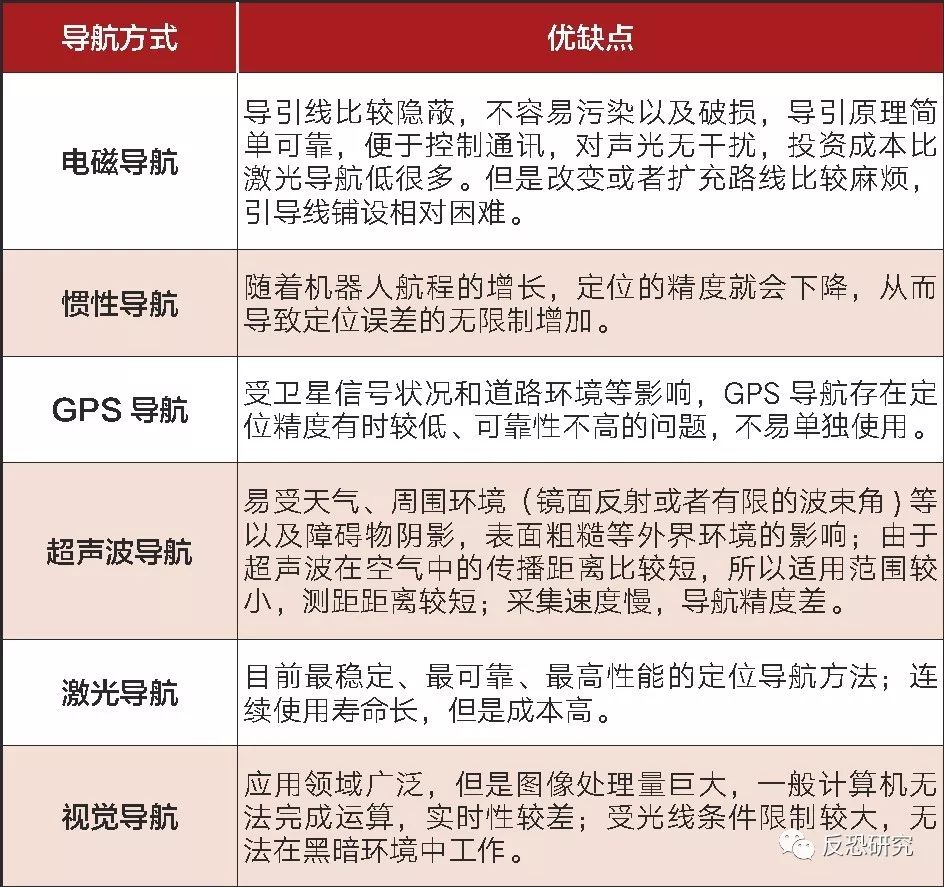
反恐机器人对环境的适应能力、行走精度、稳定性要求比较高, 目前采用较多的是激光导航和视觉导航。现有导航方式各有利弊, 独立的导航方式在导航精度、稳定性上都存在局限性, 而多种导航方式的组合是重点研究方向。
虽然反恐机器人在研究和应用中持续不断的发展, 其性能与功能逐步的提升。但是, 在实战应用和技术探讨研究上, 还存在诸多问题。从结构设计到控制框架, 从操作精度到智能水平, 也都有一定的局限性。
侦察机器人, 因其作战环境较恶劣, 其结构设计和材料应用存在不足, 无法适应多样化的作战环境, 可靠性也受到这两个因素影响。排爆机器人要对爆炸物进行抓取、销毁, 而爆炸物的质量、外形、体积多变, 所处环境复杂, 操作人员在实践过程中无法在现场进行标定, 视觉定位精度差, 给物体抓取造成较大困难, 且排爆机器人抓取精度较低、力度控制不够准确。攻击机器人因其杀伤性大, 所以对精确度和稳定能力的要求更高, 而面对复杂现场要精确识别敌人, 避免伤及无辜, 还要进一步加大研究力度。
以上问题为反恐机器人的发展指明了方向。未来, 反恐机器人的发展的新趋势集中体现在三个方面:平台模块化、功能智能化和应用多样化。
机器人平台是反恐机器人研究与应用的基础。反恐局势日趋紧张, 对机器人的需求慢慢的变多, 要实现反恐机器人产业化, 必须先实现机器人平台模块化。平台模块化指的是机器人各构件形成统一标准, 能够准确的通过实际的需求来对反恐机器人进行组装。这样既方便机器人形态改进, 又便于机器人产业化, 有利于反恐机器人的研究与应用推广。
反恐机器人的应用场景不同, 功能要求也不一样。当前的反恐机器人存在的很多问题都是因其智能化程度不高造成的。如物体识别和抓取不够智能, 没办法完成自主抓取;机械手臂运动不灵活、抓力不灵敏;单一机器人作战能力不强, 没有实现多机器人协同作战;机器人的越障能力比较差;仿生化程度不高;远程操控现场感不强等。应当在今后的发展中注重引入更多的新技术, 使其功能更加智能化, 更好地为反恐作战服务。
现有的反恐机器人大多是一款机器人对应一种应用场景, 存在应用单一的问题。以空间应用为例, 水陆空三种作战环境, 机器人都是一栖作战, 还没有两栖或三栖作战机器人, 应用单一且缺少协同。侦察、排爆、攻击功能分割明显, 不进行交叉组合。因此, 应用多样化是反恐机器人的一个重要发展方向。
反恐机器人应用场景广泛, 可有效提升作战效率、减少人员受伤或死亡, 对打击、维护社会稳定具备极其重大意义。经过多年研究和发展, 成果显著, 其功能多样, 在反恐战场中表现突出。经过实战应用, 反恐机器人还存在诸多问题, 在智能化程度方面有待提升, 应把握科技前沿、立足实战、着眼未来, 加大反恐机器人智能化研究, 做好功能与实战需求的对接, 提高其稳定性和可靠性, 切实推进反恐装备的应用和发展。
[4]任桃桃.小型轮式双面行驶无人侦察平台设计与研究[D].南京理工大学, 2017.
[5]黄思姬.地面武装机器人机械系统模块设计与试验研究[D].南京理工大学, 2017.
